2014年12月20日に開催された"第2回ROBO-剣 大会”に創生科学科小林研究室3年の山崎 岳君が作成したロボット「ケンコバ」として出場し、ベスト8に入り画像処理テクニック賞を受賞しました。
去年の第1回ROBO-剣での反省と改良、ルール変更に伴う、画像処理機能の高速化の追加などを行いました。
本大会での試合は、惜しくもベスト8という結果になりましたが、MATLABで行ったシミュレーションと画像処理,GUI,自律機能などが評価され、画像処理テクニック賞を頂くことができました。
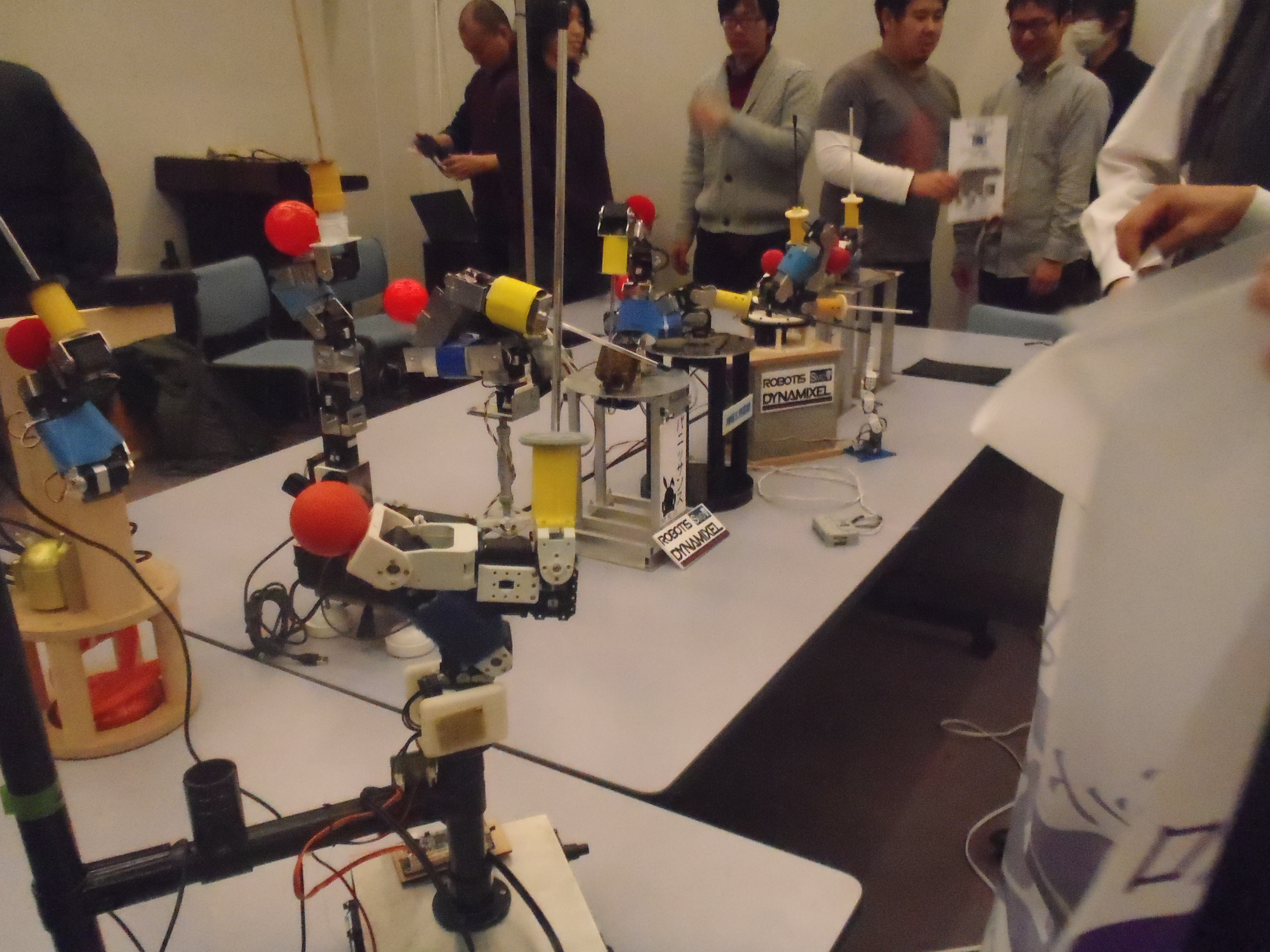
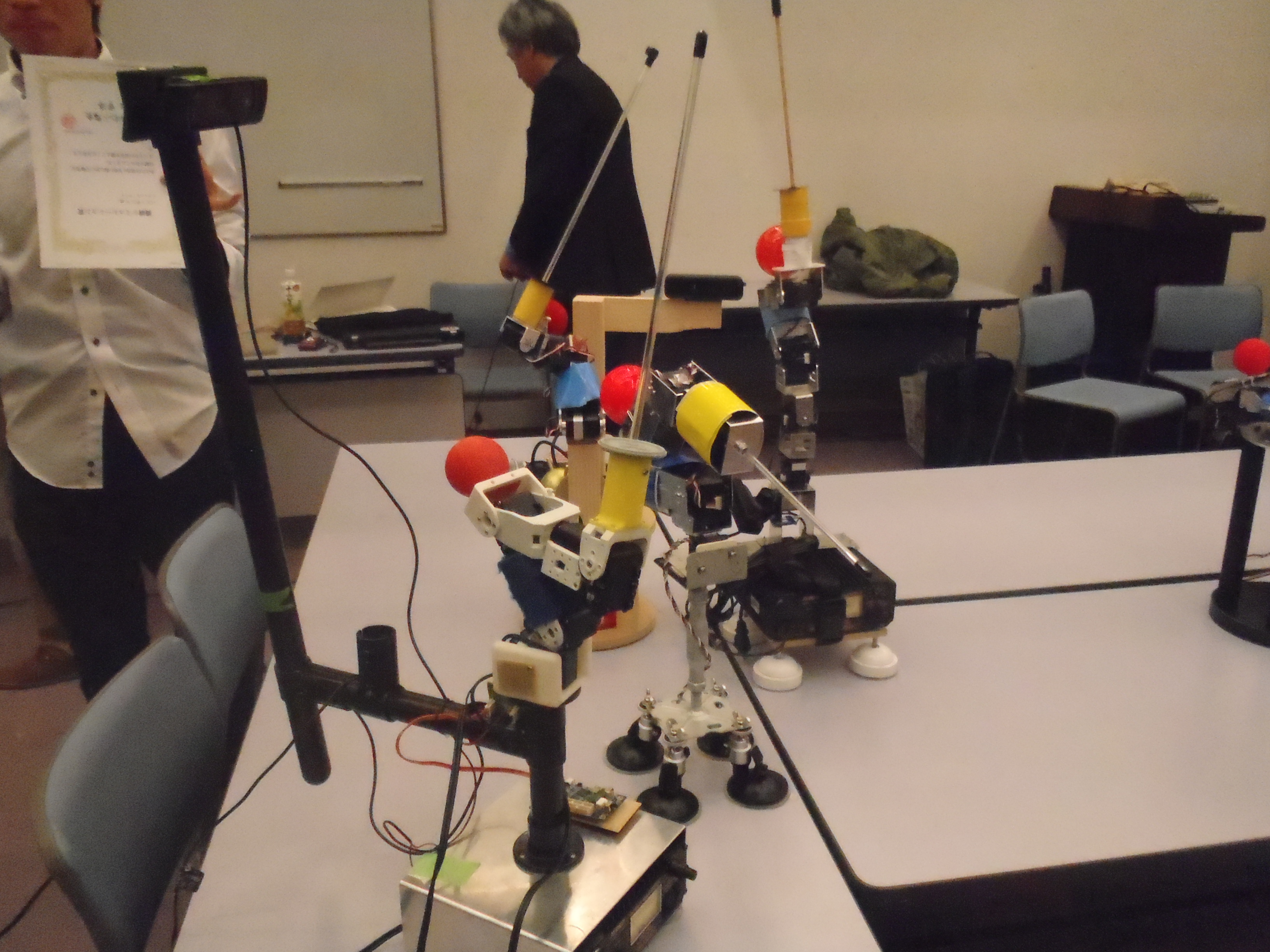
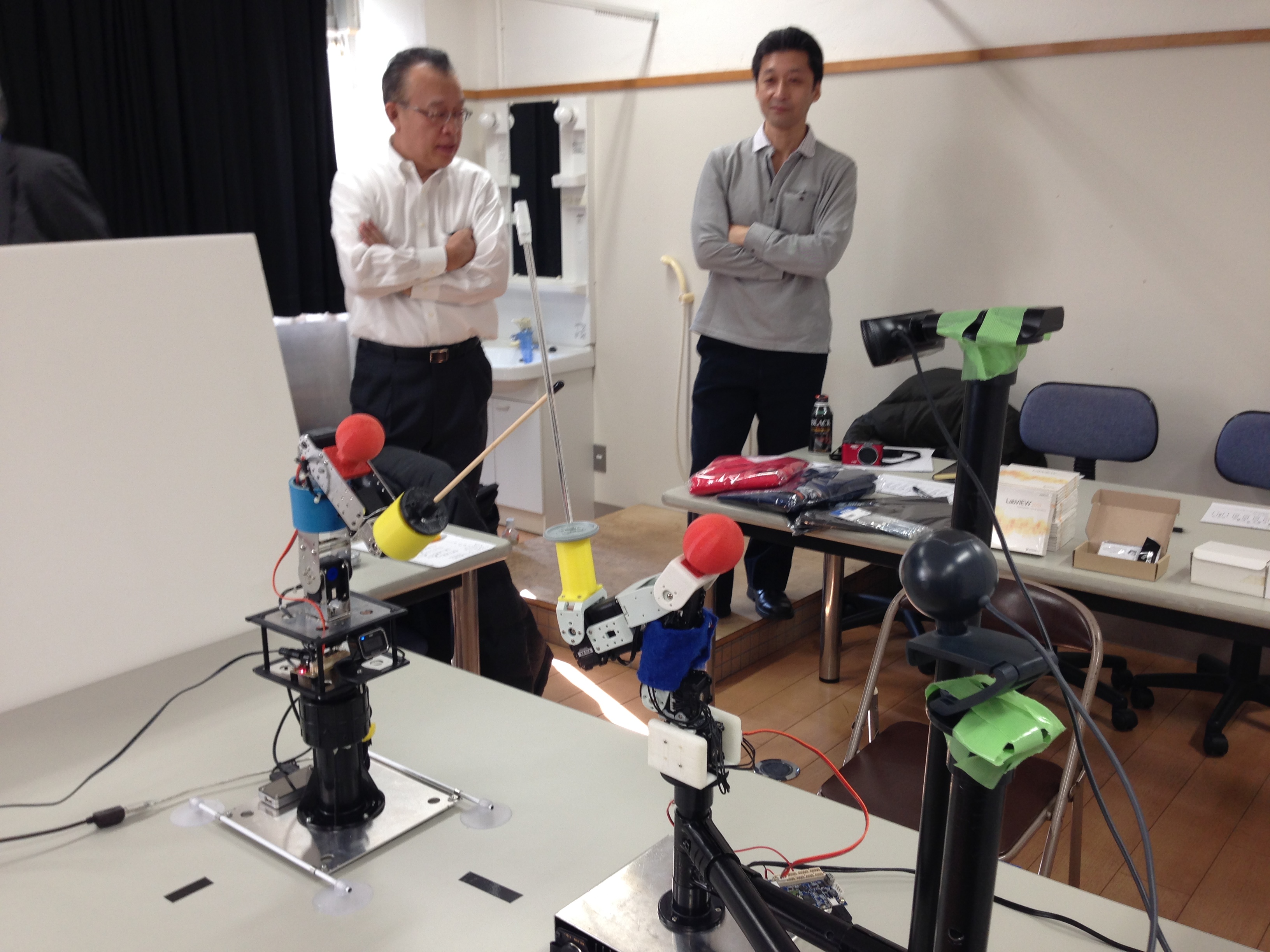
試合中のケンコバ(手前のロボットアームです。)
本大会では参加チームも増え、海外から参戦するチームなどもいて白熱した試合でした。
動画を再生するには、videoタグをサポートしたブラウザが必要です。
2013年12月7日に開催された"第一回ROBO-剣 大会”に創生科学科3年生のチームで作成したロボット「ケンドーコバヤシ」として出場し、第3位入賞、企業賞を受賞しました。

10月の練習会では、準優勝をしましたが、その時の反省と改良、ルール変更に伴い、画像処理機能の追加などを行いました。
本大会での試合は、惜しくも3位という結果になりましたが、MATLABで行ったシミュレーションと画像処理が評価され、協賛企業である、Mathworks社様、杉浦機械設計事務所様の2社からそれぞれ、企業賞を頂くことができました。
試合中のケンドーコバヤシ(右側のロボットアームです。)
本大会では参加チームも増え、海外から参戦するチームなどもいて白熱した試合でした。
2013年12月7日に開催された第一回Robo-剣 大会の実技による評価はこれで終了しましたが、この大会と同時開催の、開発ツール活用コンテスト(締め切り2013年12月31日)に提出するためのシミュレーション機能の追加を行ったレポートの提出に向けて、頑張っていきたいと思っています。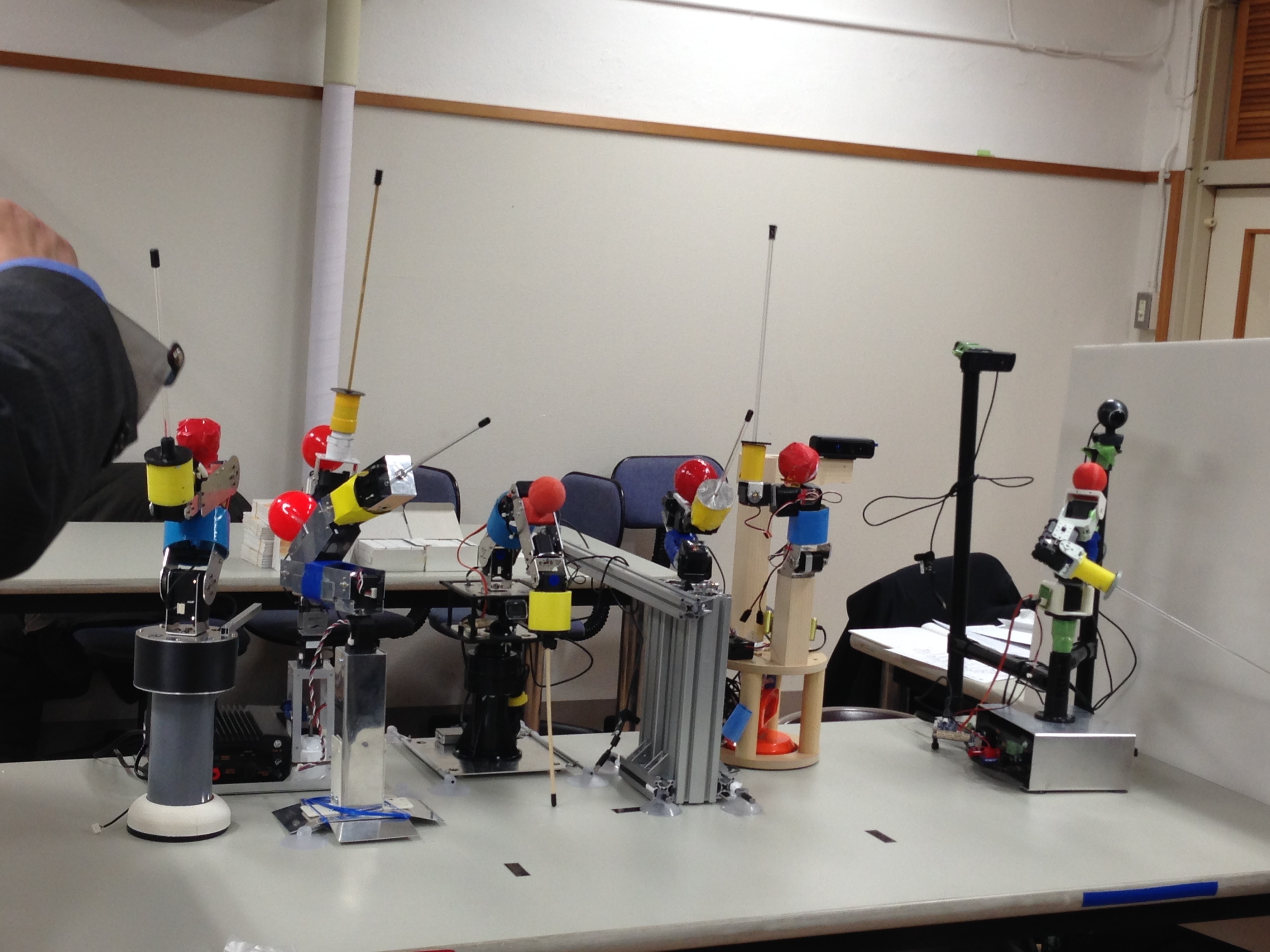
”帯刀しているケンドーコバヤシ”(全体図 一番右のロボットアームです。)
horikawa
PsoCに磁気、加速度センサを取り付けて無線モジュールでPCと通信を行いました。
磁気センサ、加速度センサからそれぞれX、Y、Zの3チャンネルで出力された値をAMUXで加速度と磁気とを切り替えつつTRIADCを用いてPSoCに取り込みました。
PSoCに取り込んだ信号はPGAで増幅され、TX8から無線モジュールを用いてPCへ送信されます。
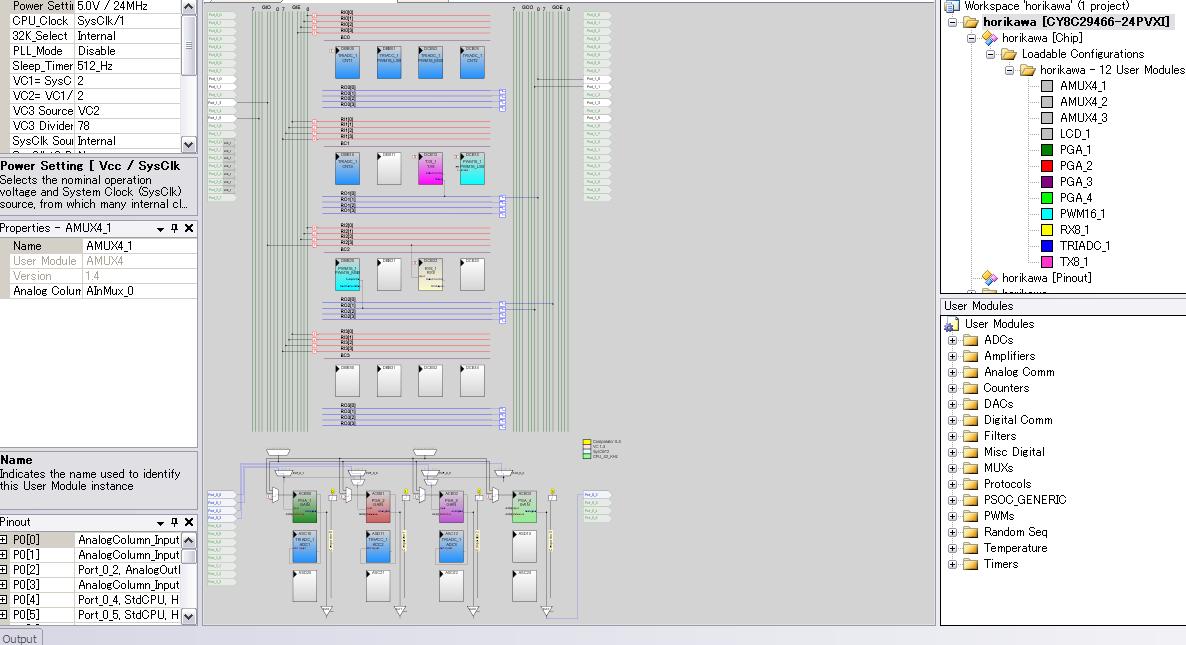
使用したツールは"PSoC Designer 5.0"、"PSoC Programmer"、"Tera Term"の3つです。
PSoCでのChip設定はこのようになっています。
PSoCの27シリーズ、29シリーズ(これ以外は持っていない・・・)には、ACBブロック、ASCブロック、ASDブロックの3種類のアナログブロックがある。
ACB(Analog Continuous Block Type B)
ASC(Analog Switched Capacitor Type C)
ASD(Analog Switched Capacitor Type D)
がある。
ここでは、CY8C29466のアナログ連続ブロック ACBブロックについて調べた結果を記述する。