組込みマイコンの中での安価で、機能が充実しており、Linuxが動作可能なSH3マイコンであるSH7706LSRでDebianを動かすことができたので、そのやり方を解説します。かなり強引に動かしているため、起動時などにエラーが出ますが、一応、ネットワーク、SDカードなどを使うことができます。
Debian Linuxなので、ソースをクロスコンパイルすることなく、apt-get をすることで、Python、Perl、telnetサーバ,ftpサーバ,gccなどを動作させることができます。
SH7706LSR上でDebianを起動させる手順を以下に示します.
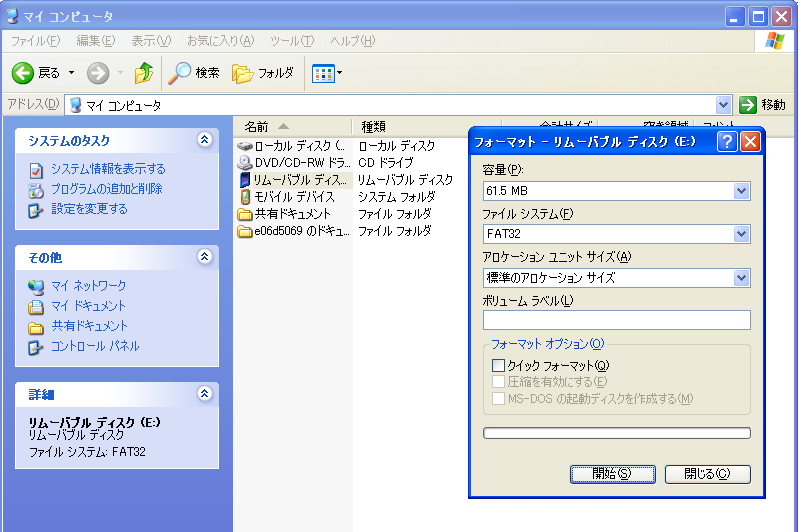
SDカードをfat32でフォーマットします.SDカードは、1G以上のものを用意してください.ここでは,2GのSDカードを用い動作確認をしています.
「マイコンピュータ」⇒「リムーバブル ディスク」⇒右クリック「フォーマット」⇒ファイルシステム「FAT32」⇒「開始」
関連ファイルとDebianアーカイブをフォーマットしたSDカードにコピーする
関連ファイル boot.exe / initrd.img / rootfs.img / vmlinux / rootfs.tar.gzをSDカードにコピーする
最近はやりの組み込みマイコンのBeagleBoard-xmとKinectで実際動かすことができるのかを調べる目的の過程をメモです.この手順でインストールすれば,動くことは確認しました.この状態で,深度と画像を表示した場合,1frame 160ms ~180ms程度かかります.大体5Hzぐらいの性能でしょうか?
基本はココの手順で,Ubuntu Linuxをインストール,FreenectとOpenCVをインストールしていきます.
http://elinux.org/BeagleBoardUbuntu
必要なもの
-----
4GByte 以上のMicroSD
vmware player と32bit版 ubuntu 11.04
BeagleBoard-xm Rev.C
HDMIとDVIを結ぶケーブル
Ethernetケーブル
5V電源
USBマウス
USBキーボード
USBシリアルコンバーター(これは,PCからBeagleBoard-xmの232c端子に接続)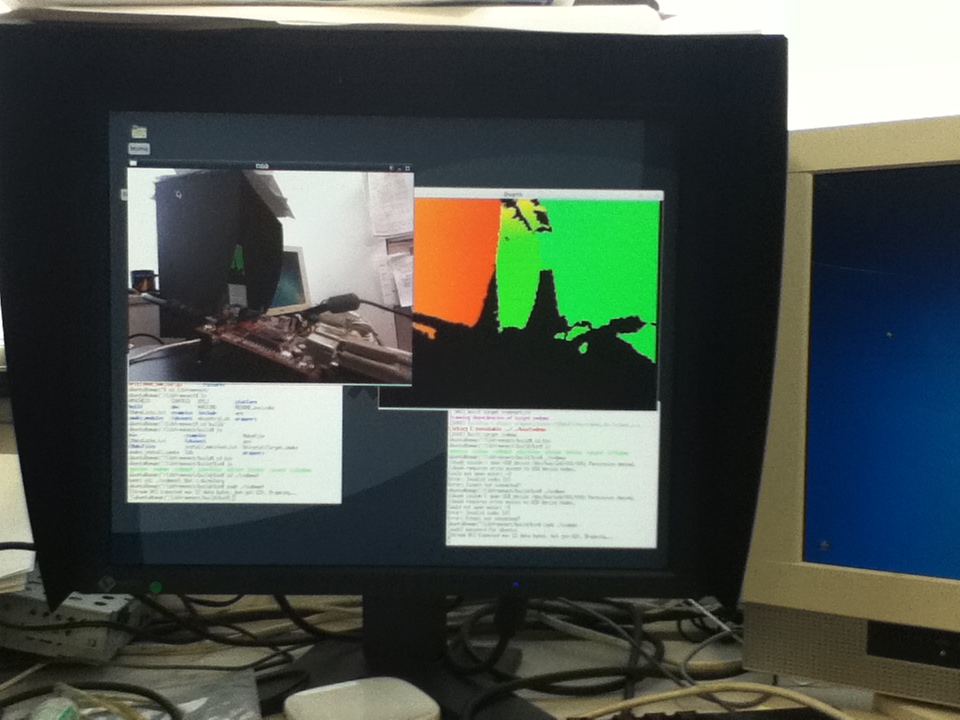
2013年10月19日に"ROBO-剣練習大会”に出場し優秀賞(2位)を獲得しました。
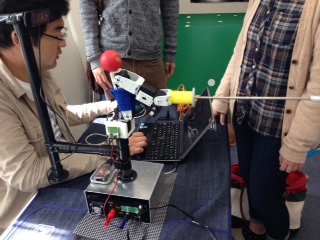
名称 ”ケンドーコバヤシ”(秋葉原の近藤ロボスポット)
ROBO-剣とは?
ROBO-剣は、今年度から始まった、ロボット剣道の大会です。知能を持つ関節型ロボットの普及を目的としたもので最大5軸のロボットアームにより剣道で勝敗を争います。
練習大会(10月19日)は、本大会(12月7日)に向けての予備戦として開催されました。実機同士の試合は今回が最初で、勝敗だけではなくロボットの技術の高さやアクションのすばらしさが審査されました。
本研究室では技の完成度やお辞儀などの細かいモーションが評価され、2位にあたる優秀賞を獲得しました.

”授賞式”

" 優秀賞!!”
今回はオペレーターがマニュアル操作をしましたが、今後の課題として、操作をアシストする画像処理などを実装し受けの自動化など、さらに完成度を高め、本戦に出場したいと考えています。
ROBO―剣 本戦予定
・日 時:2013年12月7日(土)
・場 所:東京(会場は参加者の状況を把握の上決定します。)
・大会内容:ROBO-剣-マニピュレータ大会
ROBO-剣-自律大会
※練習大会での状況を考慮し、両者混合での大会とする場合がある。

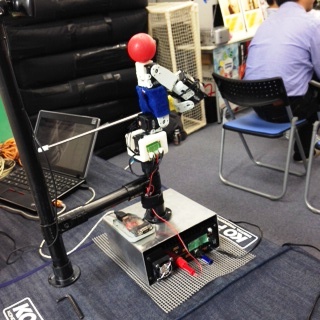
”ケンドーコバヤシ”(全体図)